新型机械义肢亮相:更安静、摆动更灵活
2020-07-17 09:25
cnBeta.COM
相比较传统义肢,机械义肢有诸多优点,但也存在成本高、噪音大、续航差等诸多不足。近日来自德克萨斯大学达拉斯分校的科学团队开发出了一种新型机械义肢,利用最初用于国际空间站机器人提货的电机,打造出了更安静、摆动更灵活的义肢原型。
传统义肢使用过程中,使用者通常每走一步都要抬起和摆动臀部,以便将腿抬离地面并向前移动。这导致了一种不自然的步态,不仅令人疲惫,而且随着时间的推移可能会导致疼痛和受伤。
而机械义肢包含电动关节,每走一步都会自动将腿部弯曲起来并向前移动。为了适应有限的空间,电机通常体积小,旋转速度快。一系列的齿轮被用来将扭矩从这些电机传递到关节。
但这种机械义肢会产生很大的噪音,另外它们还增加了阻力,使关节无法自由摆动。此外,这些电机还消耗了大量的电池电量,限制了用户一天的行走距离。
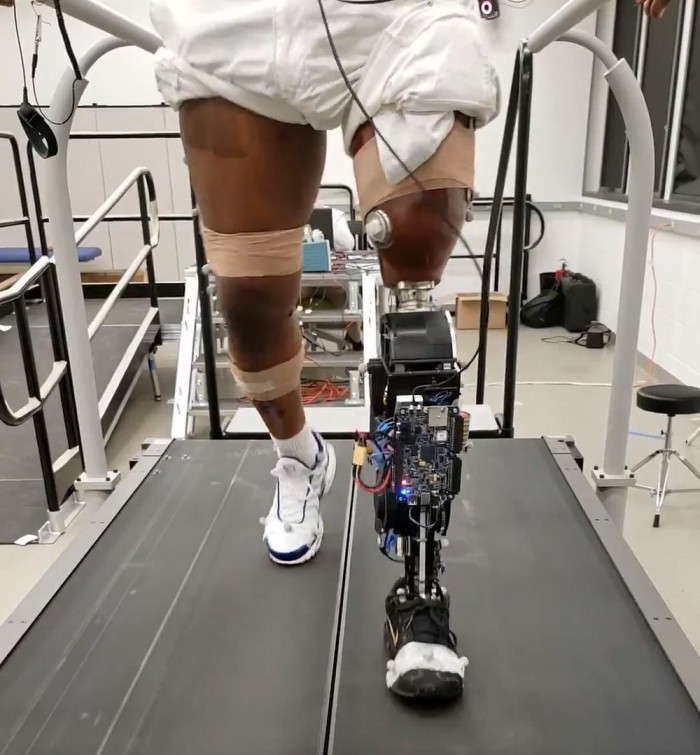
而科学团队开发的新义肢原型只在膝盖和脚踝关节处装备了两个电机,功率足够大,只需要最小的传动装置--这意味着该腿比其他机器人假肢更安静,而且摆动更自由。

此外,机器人腿部还集成了一个再生制动系统,在每次迈步结束时都会使其减速。这种设置不仅能让脚不至于以震荡的力量与地面相碰,还能用捕捉到的能量为电池充电。因此,据称,只需对电池进行一次初始充电,就足以满足一整天的行走需求,这比其他机器人假肢的续航能力高出一倍。
科学家们现在正在改进控制算法,使该设备能够根据地形、行走速度和活动的变化自动调整。由Robert Gregg副教授(现在在密歇根大学工作)领导的关于这项研究的论文最近发表在IEEE Transactions on Robotics杂志上。

责编:陶宗瑶