科学家研发出仿生机器人 探索蜥蜴爬行原理
2021-04-01 10:02
环球网
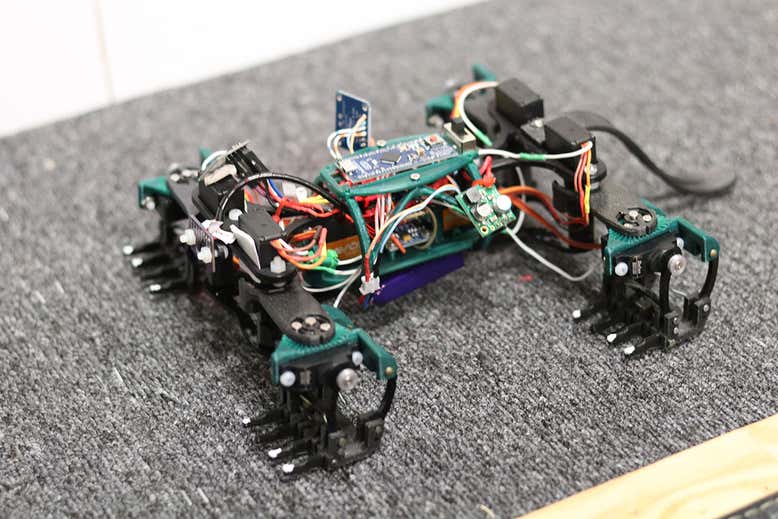
【环球网科技综合报道】4月1日消息,据外媒报道,来自澳大利亚阳光海岸大学的研究团队研发出一款仿生机器人,并有望据此揭示蜥蜴等爬行动物在垂直表面的运动原理。
据了解,科学家们从三方面进行了研究,分别是爬行速度、前后肢配合程度、四肢和脊柱配合程度。
具体而言,研究显示,当机器人的爬行速度高于其最高速度的70%或低于40%时,都有更大的几率会掉下来。
同时,当这款机器人的前肢向外旋转20度,后肢向外旋转100度时,可以更稳定地停留在墙上。当它的四肢以同样的角度向内旋转时,也同样可保持稳定。
研究还发现,当机器人将四肢运动与脊柱旋转结合起来时,比单独运用脊柱爬得更远。
因此,研究团队认为,无论是蜥蜴还是这款仿生机器人,若想爬行得更远且稳定,都需要控制适当的速度,并进行前后肢、四肢与脊椎的配合。
对此,研究人员克里斯托弗·克莱门特表示:“要想制造行动更高效的机器人,我们首先应该关注自然,从中寻找灵感。”
责编:郑湘琪
版权作品,未经环球网 huanqiu.com 书面授权,严禁转载,违者将被追究法律责任。