四足机器人新研究:用双脚也能保持平衡
2020-07-06 14:09
张阳
环球网
【环球网智能报道 记者 张阳】目前,四足机器人能够完成很多令人印象深刻的动作,但是也有一定局限。大部分情况下,机器人只能在大面积表面上行走。一组意大利机器人研究人员正在试图改变这种情况。近日,据外媒报道,他们发明了一种机器人控制器,可以让机器人走过狭窄的表面。
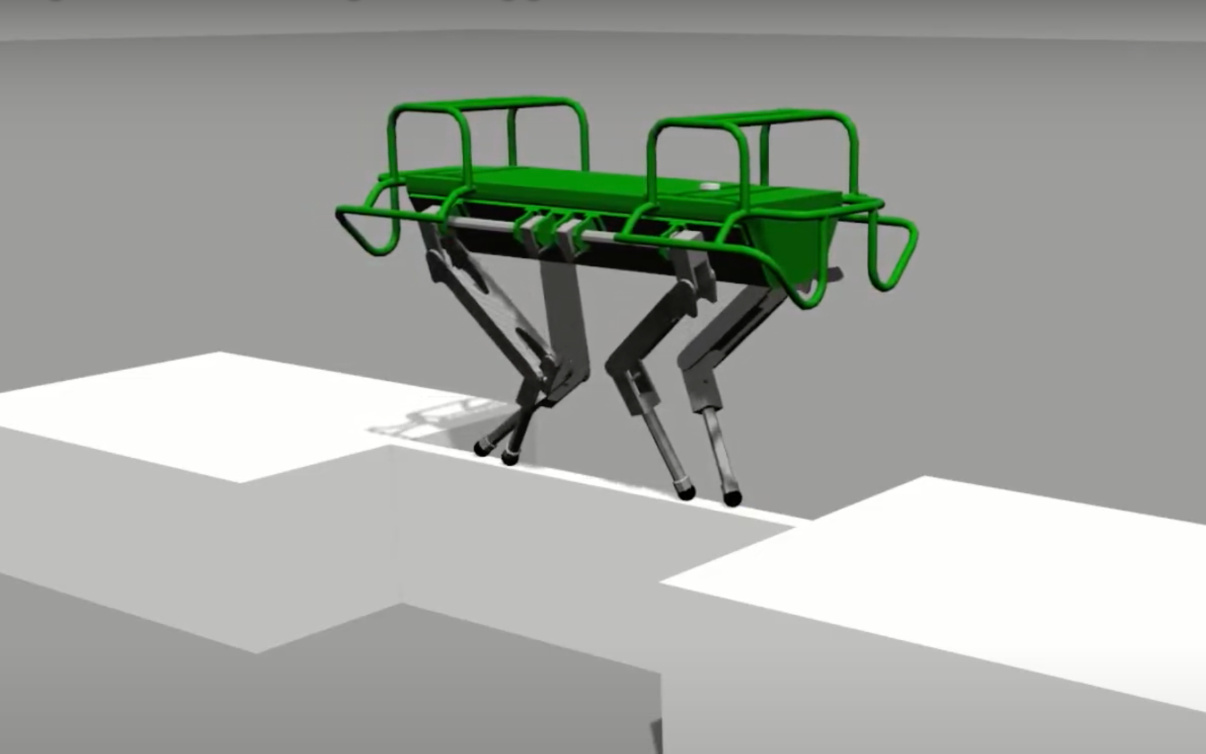
在这种控制器的支持下,四足机器人可以只用两条腿保持平衡并踮起脚尖行走。在数字模拟过程中,一个90斤重的机器人可以通过只有6厘米宽的桥。
在一段视频中我们可以看到,意大利技术研究所的研究人员展示了机器人在被工作人员干扰的情况下依然可以用两条腿保持平衡。
在四足机器人行业中,美国波士顿动力可以说是极为知名,但随着这种控制器的出现,未来我们会看到更多的四足机器人应用。
责编:张阳
版权作品,未经环球网 huanqiu.com 书面授权,严禁转载,违者将被追究法律责任。